-
咨询热线:
15062200231 -
电子邮箱:
yin_zhiping@qdsy-sensor.cn
咨询热线:
15062200231电子邮箱:
yin_zhiping@qdsy-sensor.cn
是切割机中必不可少的配套设备,大范围的应用于大型装备制造、造船和切割等领域,其基本功能是保证切割...
发送询盘即时聊天是切割机中必不可少的配套设备,大范围的应用于大型装备制造、造船和切割等领域,其基本功能是保证切割割炬与被切割工件保持最佳切割距离,消除由被切割工件的不平度变化引起的加工精度误差。切割机在工作过程中不能准确获取切割割炬与钢板的距离,这就必然影响钢板的切割质量。切割的弧电流强光会给操作人员造成视觉疲劳。因此,给出了一种基于
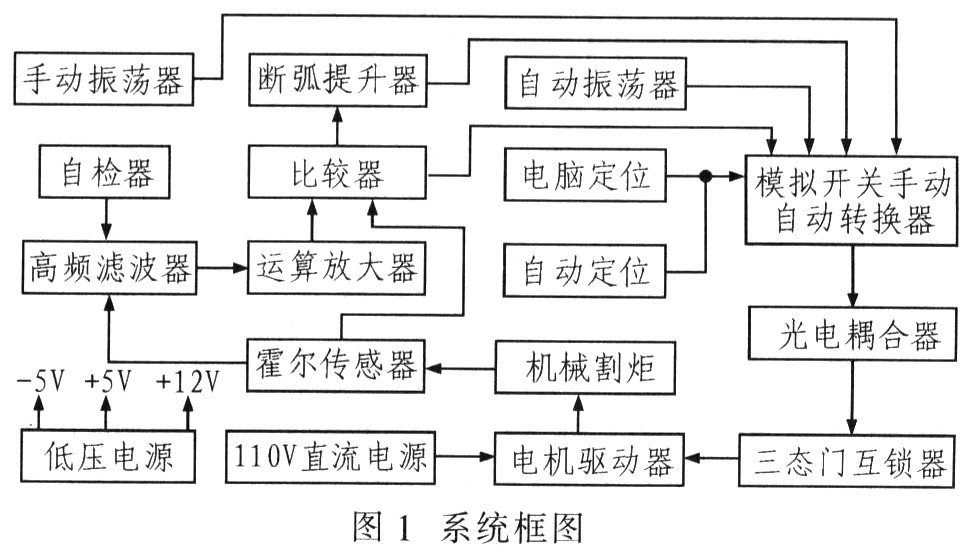
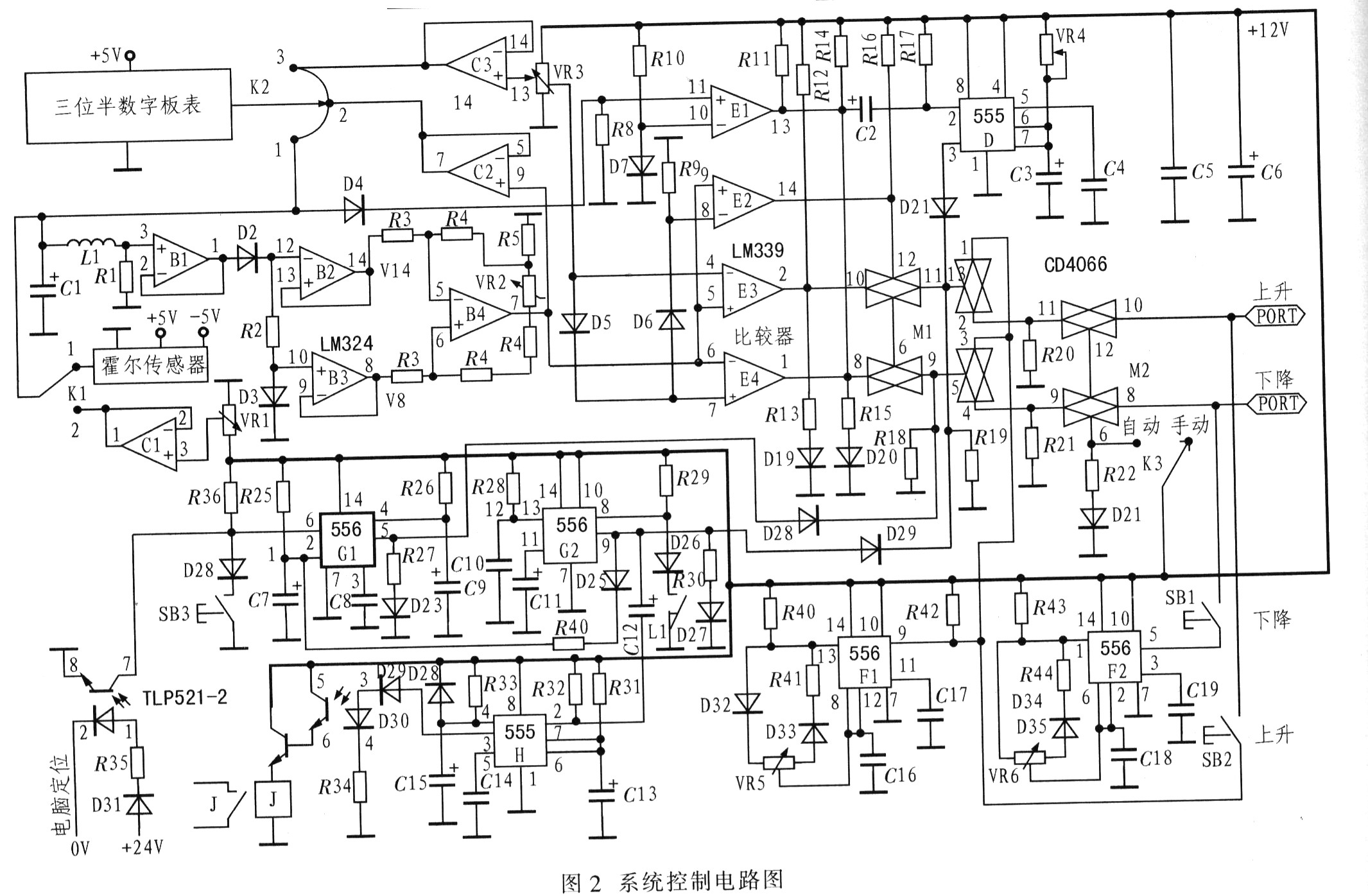
该设计方案利用霍尔效应原理产生随磁场变化而产生一些变化的电压,把变化的电压送到自动高低调节器,控制割炬的上升与下降,形成一个闭环的自动高低调节系统,如图1所示。该闭环自动控制系统由霍尔传感器、自检器、高频滤波器、运算放大器、比较器、断弧提升器、模拟开关手动自动转换器、光电耦合器、三态门互锁器、电机驱动器以及机械丝杆传递定位系统组成。图2所示是系统控制电路图,从而能在切割过程中实时控制割炬与钢板的距离,有效保证钢板的切割质量。
将一块导体板置于磁场,使磁场的磁感应强度B的方向与板垂直,当导体板中流经一定电流时,垂直于磁场和电流方向的导体板的横向两侧会产生一定的电势差,这一现象称为霍尔效应。霍尔传感器是根据该原理制成的。图3是一个霍尔传感器,它共有4个接线 V和电压输出,水电缆通过中间空心圆。

等离子发生器起弧后,霍尔传感器采集割炬与钢板之间的电流,水电缆中的电流穿过霍尔传感器,在其周围产生恒定磁场。向霍尔传感器预先施加一恒压,产生一恒定电流,霍尔传感器则输出霍尔电压。如果切割电流有微小变化,则产生一些变化的磁场,而输出的霍尔电压也是变化的,这样就把切割中的变化电流转化为变化电压,输出的霍尔电压包含有干扰信号,其高频信号的范围较宽,这就需对信号电压进行高频滤波,从而获取有用信号,再将其信号送至等离子自动高低调节器。以运算放大器C1的引脚1的输出电压作为自检电压,并通过调节VR1改变其输出电压,也可以模拟霍尔传感器输出电压。
高频滤波电路由C1,L1,R1组成。由于高频信号经LM324运算放大器后,还有部分杂散的高频信号没有滤除,电容C1用于滤除高频信号,而电感L1阻碍高频信号,只允许被检波的低频解调信号通过,这样在负载R1上就建立了微弱的电压信号。
运算差分放大器采用LM324。R1上的电压输入B1的引脚3,引脚3缓冲输出,用于隔离信号源,提高负载驱动能力。D2和D3二极管具有箝位作用,正向导通,信号电压被耦合至R2,R2上的电压随R1变化,具有电压跟随器的作用,R2的电压输入至后续B2的12引脚,14引脚和8引脚分别输出电压V14和V8。采用双端输入、单端输出放大信号,将B3的8引脚和B2的14引脚的输出信号输入至差分放大器B4的5引脚和6引脚,由B4的7引脚输出放大后的信号。
控制系统中的比较器将差分运算放大器B4输出的电压施加至LM339比较器的E3和E4的5引脚和6引脚,而4引脚和7引脚被二极管D5箝位于0.3 V。当差分运算放大器输出的电压落在5引脚和6引脚中,即输出电压比E3的4引脚电压低,而高于E4的7引脚,比较放大器的E3的2引脚和E4的1引脚无电压输出。这时割炬与钢板的距离保持静止,发光二极管D19和D20不亮。当电压高于E3的4引脚电压,比较器E3的2引脚输出高电平,D19点亮;当电压低于E4的7引脚,比较器1引脚输出高电平,D20点亮,从而指示割炬的升高或降低。调节VR3电位器中点电压,改变E4的4引脚和7引脚电压,使其始终箝位于0.3 V,实际上就是改变割炬离钢板的实际距离。由图2看出,当割炬离钢板时,霍尔传感器和B4都输出低电压,甚至低于E2的8引脚电压。使E2的14引脚输出低电平,从而控制M1模拟开关的12引脚和6引脚,M1变为开路状态。比较器信号无法通过,割炬保持静止。
起弧后,霍尔传感器产生的电压通过D1送至E1的11引脚,由于E1的10引脚的发光二极管被箝位于2 V,所以当霍尔传感器起弧后输出电压低于2 V时就为断弧,处于断弧状态时E1的11引脚电压比10引脚电压低,13引脚输出低电平,该下降的低电平通过微分电路C2和R17产生下降的负向微分信号来触发NE555单稳态2引脚。NE555在电源打开瞬间产生一个控制模拟开关的输出电压,选通模拟开关,这样M1的脉冲能够顺利通过引脚,使割矩产生提升动作,从而为自动定位作好准备。即使在数控机切割爬坡过程中,突然断弧。割炬也会顺速提升,割炬避免与钢板碰撞,从而保护割炬。
模拟开关是由两片CD4066集成电路组成,用于控制手动和自动调节割矩高低。自动状态下,K3处于自动档位,控制M2的6引脚和12引脚来选通M2,使上升信号和下降信号顺利通过M2模拟开关,发光二极管D21可指示自动和手动状态,D21点亮时表示自动状态,反之为手动状态。也可通过手动调节SBl和SB2,以实现割矩高低调节。
自动定位时,K3处于自动状态,按下SB3按钮,触发单稳态556器件C1的6引脚,其5引脚输出的高电平通过D28加到M1的5引脚,选通模拟开关M1的3引脚和4引脚,这时F1器件的9引脚输出振荡方波加到M1的3引脚。由于K3处于自动状态,M2的6引脚和12引脚处于高电平,振荡方波通过M2传输给光电耦合驱动电机电路,从而驱动直流电机正转。通过丝杠带动割炬向下运动,割炬碰到钢板,钢板顶起割炬,直到割炬触头碰到微动开关L1。L1微动开关闭合,触发单稳态延时电路G2的8引脚,9引脚输出阶跃上升信号,可迅速输入到G1的2引脚复位端,使5引脚停止输出高电平,以终止割炬继续下降。该信号同时通过D29加到模拟开关M1的13引脚,以选通M1的1引脚和2引脚,这时G2的9引脚输m的振荡方波加到M1的1引脚,由于K3处于自动状态,M2的11引脚和10引脚处于选通状态,振荡方波通过M2的11引脚和10引脚,传输到光电耦合驱动电机电路,从而驱动直流电机反转,G2的9引脚延时单稳时间或割炬上升定位时间,或直流电动机反转提升割炬时间。定位后,G2触发单稳态电路H器件555的2引脚,H通过R31和C13时间常数的积分延时,3引脚输出一个脉冲方波,通过D29和光耦,使继电器上电,常开触点闭合,启动起弧开关,传送至等离子发生器,使得强大的电流击穿钢板,起弧成功。霍尔传感器采样起弧信号,输出电压,传送至B1的3引脚,使B1的1引脚输出变化的电压,以此来实现调节。
手动和自动振荡器组成可变占空比发生器,其原理是由F1与R40、R41、VR5、D32、D33、C16组成无稳态多谐振荡器。D32、D33分别是充电和放电回路的导通管。
调节VR5不会影响振荡周期T,但可改变占空系数,即改变脉冲宽度,也就是改变电机的旋转速度和割炬的上升速度和下降速度。
比较电路的高低调节信号通过光耦VLC1和VLC3传送至功率驱动电路,使得电机驱动电路与模拟开关电路光电隔离,这样可减少模拟开关电路的干扰。光电耦合与电机驱动电路如图4。

当上升信号通过VLC1时。D36的发光二极管导通发亮,并在R45上建立电压。该电压加在三态门S1的2引脚和三态门S4的12引脚端,与此同时,由于VLC3无信号,D37截止,在R47上无电压,该低电平信号通过S2,输出给S1控制端,S1 三态门选通。S1导通的同时,选通的S4输出信号加到S3三态门控制端,封锁S3 三态门导通。
当下降信号通过VLC3时,D37导通,并在R47上建立电压,该电压加到S3的9引脚和S2的5引脚。与此同时,由于VLC1无信号,D36截止,R45上无电压,该低电平信号通过S4,输出给S3的控制端,S3三态门选通;在S2导通的同时,选通的S2输出信号加到S1的三态门控制端,封锁S1。
当S1、S2、S4选通时,V1、V5、V6、V4、V10导通;V2、V7、V3、V8、V9截止。由于V6和V10导通,整流的直流110 V电压直接加在电机两端,电机正转,电容探头提升;当S2、S3、S4选通时,V2、V7、V3、V8、V9导通;V1、V5、V6、V4、V10截止,由于V9和V7导通,整流的直流110 V电压直接加在电机两端,电机反转,电容探头下降。
该电路受外界电磁干扰或者误操作,同时按动“上升”和“下降”按钮,可能会引起VLC1和VLC2同时选通,但由于74LS125三态门具有保护作用,只允许上升或下降信号通过,电路具有互锁性,可避免烧坏后续驱动管。当电机电流大于V6、V7、或V9、V10驱动管额定电流时,驱动管可能被烧坏。因此,采用74LS125三态门互锁,并在V7和V10发射极增加采样电阻。当采样电压超过光耦导通电压,光耦输出将调高的信号电压短路,使信号电压不能通过VLC1或VLC2,这样就保护了驱动管。
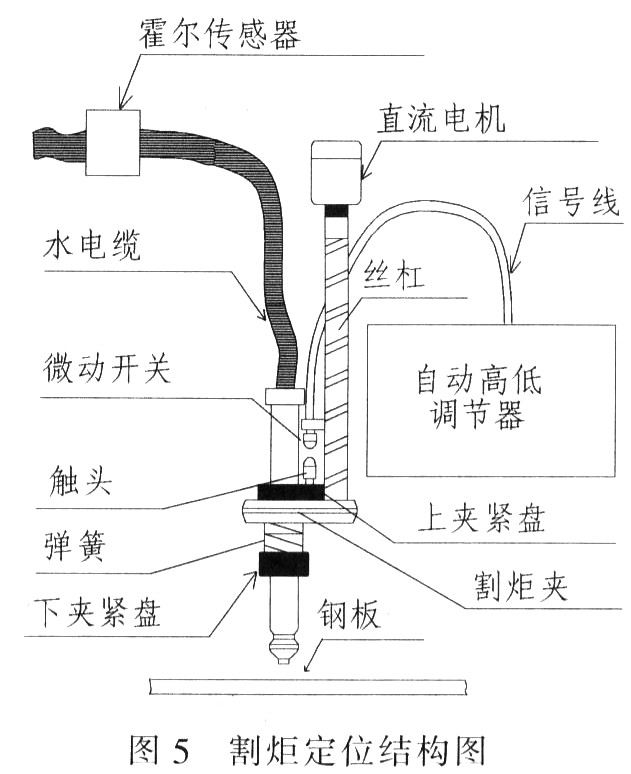
割炬定位机械结构是由霍尔传感器、水电缆、微动开关、触头、上夹紧盘、割炬夹、压缩弹簧、下夹紧盘、信号线、丝杆、直流电机组成。上夹紧盘、下夹紧盘和压缩弹簧夹紧割炬,割炬穿过割炬夹圆孔。割炬夹圆孔直径比割炬直径稍大一些,这样可在夹圆孔中上下活动。由于弹簧和重力的作用,割炬平稳垂直地放在割炬夹圆盘上,水电缆穿过霍尔传感器,霍尔传感器采集切割变化的电流,如图5所示。割炬定位时向下运动,割炬碰到钢板后,钢板顶起割炬,这时割炬与割炬夹产生相对运动,弹簧被压缩,直到割炬触头碰到微动开关L1。L1闭合产生的触发信号通过信号线传给自动高低调节器,通过触发单稳延时电路,产生割炬上升定位时间,也是直流电动机反转提升割炬时间。由于割炬的提升,压缩弹簧逐渐恢复,如果事先通过自动高低调节器设定割炬提升时间常数,从而确定割炬提升后割炬与钢板的距离,获到割炬与钢板的最佳起弧距离。
系统使用前应进行电路自检。首先打开电源开关,这时电机提升,D36点亮,说明D单稳态3引脚输出高电平;按下SB1和SB2,割炬上升或下降,说明F1和F2振荡器和功率驱动正常:自动/手动开关K3置于自动状态位,按下SB3按钮,D36先点亮,瞬间熄灭后,D37点亮,接着熄灭,说明G1和G2定位系统正常;K1和K2分别打在1和2位置,调节VR1电位器,如果三位半板表有电压变化指示,说明运算放大器C1和B正常;板表测到一个电压值,再左右调节VR3电位器,如果D19和D20交替点亮,说明比较器E正常的。
K1打在1位置,K2打在2位置,K3在手动位置,启动起弧测量。如果板表测量值在3 V和8 V之间,将K2设在3位置,并调节VR3,使电压介于3 V和8 V之间,然后把K3打在自动位置,就可以测量。
根据真实的情况霍尔传感器可选型为:40 A/4V,60 A/4V,80 A/4 V,100A/4 V,120A/4 V,160 A/4 V,200 A/4V,300 A/4 V。霍尔传感器与高低调节器之间连接,应使用屏蔽电缆,屏蔽线接地,以免等离子起弧时,空间的强大电磁干扰把霍尔传感器里面的电路击穿而损坏。
霍尔传感器应用到数控切割中是等离子切割机一种新的调节方法。这种方法不但切割后工件质量好,精度达到一定的要求,同时还减轻了操作者的劳动强度。该系统模块设计不但可用于常规的套料切割,还能够适用于水下套料切割,省时、省力、自动化程度高,安全可靠,通过多年的实际应用,使用效果良好。

